|
The Star Tracker The SED16 Star Tracker (STR) family enables autonomous restoration of 3-axis satellite attitude from observation of the celestial vault, regardless of FOV configuration or satellite orientation, over a wide range of angular rate. The functions of the Star Tracker are incorporated into a single unit which features:
The software used on the Star Tracker enables the 3-axis attitude restoration with complete autonomy of the star sensor (which incorporates star catalogs, recognition and tracking algorithms). The baffle is a sub-assembly that is integrated within the Star Tracker. DESCRIPTION Operating principles The Star Tracker principle of operation is based on determination of several star positions and magnitudes within its field of view using a detection system comprised of a lens and a CCD working in the 0.45 µm to 1.1 µm bandwidth. The hardware and software detector signal processing, along with onboard stars catalogs processing, are used to determine accurate attitude. The two primary functions of this sensor are:
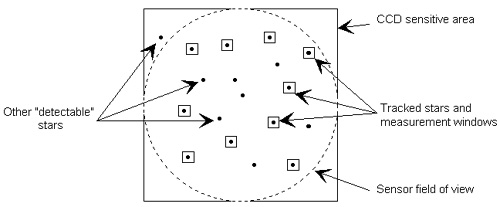
The first function involves determination of the attitude, speed and acceleration by the sensor alone with no initialization information (” lost in space ” function). This function is based on the identification of a star pattern after classification of a detected star. The second function involves determination of the precise attitude and speed from rough attitude data. The sensor selects 10 stars within its field of view and places detection windows centered on the expected star positions. The pixels in these windows are processed to get the best accuracy for each single star position and magnitude. The single star data is then processed to produce the best attitude data.
TECHNICAL DESCRIPTION The Star Tracker (STR) includes the following items in one integrated unit :
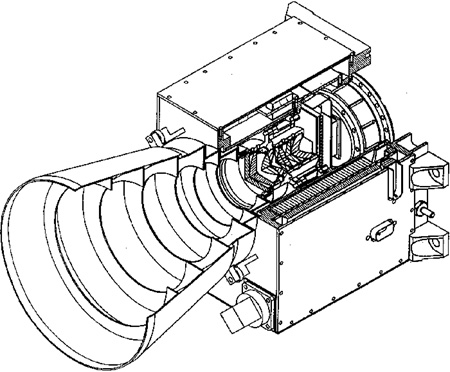
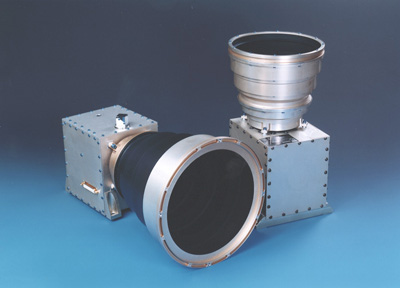
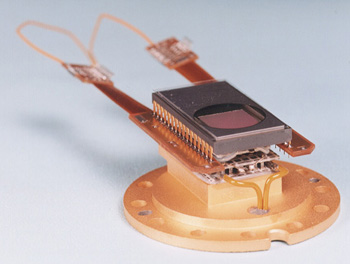
View of the STR
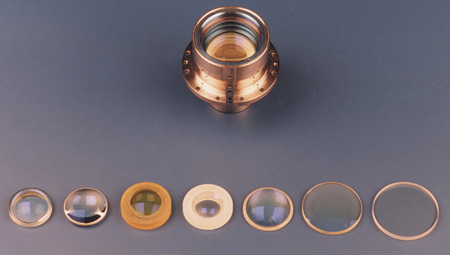
STR a and b LENS The lens is a ” double Gauss ” system made of 7 lenses (including one doublet) realized with radiation hardened glasses coated with anti-reflection coating. The space exposed face is protected by a silicon plate which protects it from electrons. The lenses are mounted in a titanium structure and glued in place to ensure very good stability. The main characteristics of this lens are:
STR lens Baffle The baffle is required to protect the star sensor from stray light sources (e.g., Sun, Earth) in order to comply with the functional and performance requirements. The star sensor (baffle + optical head) attenuation is required to be better than 107.3 with 103 achieved by the lens and the remainder by the baffle. The baffle design is based on a classical one-stage baffle . The total length is 160 mm but the back part fits into the optical support, so the outside length is only 145 mm (40° baffle). The baffle structure is made of from aluminum, coated with black anodization inside and alodine outside. The vanes inside the structure are Nickel coated with a “black copper” coating. They are screwed or glued to the structure. The design characteristics for the 25 degree standard baffle is summarized in the following chart:
Standard 25° baffle 25° Earth protection 19° (for full performances) Baffle attenuation ” 10 4.3 Dimensions 215 mm(Æ)´245 mm(Length) Mass 670 g DETECTION MODULE The detection module behind the lens is composed of a detector, a thermoelectric cooler and a focal plane support for connection to the structure. The detector used is the CCD 47-20 and its main features are:
Furthermore, a DUMP command is implemented near the readout register of CCD 47-20 that makes it rather well suited for star sensor application. This command allows quick access to the windows of interest by “dumping” all unnecessary lines permitting a fast transfer of the memory zone to the register. The circular field of view of the STR is inscribed in the square formed by the CCD sensitive area. In order to guarantee sighting performance over the possible operating temperature range and at the end of life (deterioration due to the radiation environment), the detector is assembled on a thermoelectric cooler which lowers the temperature. The standard operating temperature is nominally set to -5°C. The thermoelectric cooler used is a three stage module from Melcor. The detector unit and cooler device are not installed in a sealed module. Consequently, the standard performance of the sensor is therefore only attainable in a vacuum environment. Operation at ambient temperature is still possible at lower performance levels (enlarging the diameter of the spot image, varying the scale factor, etc.), as long as the operating temperature is increased in order to avoid any condensation (typically + 5°C under laboratory conditions).
The Str detection module ELECTRONICS The electronics architecture is made up of the following functions:
This architecture is built around an ASIC circuit which is involved in most of the STR electronic functions including :
This component handles real time processing of the pixels which could not be handled by the processor. Processor: The processor selected for the STR is a RISC hardened micro-controller based on SPARC architecture which includes a 32 bit integer unit and a 64 bit floating point unit. Permanent memory: the permanent memory is used for program code and stars catalog storage. EEPROM components of 128K bytes are used. RAM memory: the processor code is executed from the RAM components, which must hold the entire code. This memory is used for software uploading and processor scratch RAM. Four 128K bytes RAMs are used. SOFTWARE There are two types of software processing tasks:
|
Send us a message,we will answer your email shortly!
TY-Space Technology (Beijing) Ltd. is professional focusing on advanced attitude optical sensors, especially Star Trackers for space industry.