
In the development process of satellite industry, star trackers, as the eyes of satellites, are indispensable accessories.
Microsatellites are gradually being applied in various industries, taking on the task of large satellites, and their enormous application value and potential are highly valued by the aerospace industry. Micro satellites pursue smaller size and lighter weight in order to reduce development costs and launch cycles. Compared to large satellites in the past, small satellites use commercial devices, which have a significant cost advantage and can generally reduce budget expenses by one to two orders of magnitude. However, many satellite missions must be established on the premise of stable attitude, such as the typical small satellite ZDPS-23 σ The attitude control accuracy is 5 °, which is limited by the errors of sun sensors and magnetometers, and lacks high-precision star sensors commonly used in large satellites. However, from the perspective of the overall industry, there are currently few small satellites that can meet the high requirements for attitude accuracy in tasks such as high-resolution imaging and high-bandwidth communication. In the future, micro satellites will be applied to more space missions, and improving attitude measurement accuracy with miniaturized star sensors is an inevitable trend.
As an important visual measurement instrument for attitude determination and azimuth navigation of spacecraft, aircraft, ships, and other carriers, star sensors have the highest angular second level (1/3600 °) accuracy among all known attitude determination instruments. Although star sensors have become increasingly mature and have been successfully applied to various aerospace missions, most of them are configured for large satellites. Micro satellites have strict requirements for the voltage, power consumption, volume, and weight of star sensors.
Compared to existing large star sensors, the resources available for small satellites are limited. Fortunately, with more and more entrepreneurial high-tech small and medium-sized enterprises such as Tianyin Interstellar Technology Co., Ltd. joining the industry, the civilian and commercial path of microsatellite launch has become increasingly easy.
Beijing TYspace Technology Co. Ltd. is a company focused on the research and development of star sensors, jointly owned by Tianyin Electromechanical and Tsinghua University teams. Its core technology comes from the 20 year accumulation of space technology at Tsinghua University. The company has independently developed and produced two series of star sensors, the leather type and the nano type. 133 products have been put into operation in orbit without any faults, playing an important role in the practice of major national aerospace missions such as China’s lunar exploration project and high scoring special projects. The company has a production capacity of 500 sets per year, adapting to various spacecraft application requirements and providing professional, advanced, and economical products to customers in different fields. (Non military use)
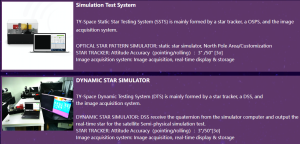
The TYspace has completed the integration of star sensors from optics, electronics, testing, satellite installation, and in orbit applications, and has the ability to mass produce, calibrate, and inspect star sensors.
The error of star sensors comes from two major modules: imaging system and software algorithm.When using a miniaturization scheme for star sensors, in addition to verifying that the photoelectric detection system meets the probability threshold of star detection on physical devices, the model should also be analyzed and calibrated to determine the detection accuracy. The error of the imaging system comes from the star position, imaging model, and attitude factor.
The attitude determination and azimuth navigation of star sensors are based on the fact that stars will remain stationary in the celestial inertial coordinate system for a long period of time. Therefore, this study does not consider the impact of errors caused by the position of stars. Using the year 2000 as the time benchmark.Visual measurement generally uses point vectors as the basic measurement elements, and vectors have two changing directions. Therefore, star sensors need to analyze two types of angular resolution accuracy: radial resolution and tangential resolution.
In order to address the tangential angle error, which is the main source of error, it is advisable to select stars that are closer to the edges of the image as much as possible. However, the lens may exhibit distortion when the angle is large. Therefore, when selecting stars, the star sensor prioritizes the calculation of the tangential angle (Z-axis attitude angle) of the stars in the field of view circle.
The main software source that affects the accuracy of star sensors is the star point extraction algorithm, but it is fundamentally affected by the photoelectric detection conversion performance of the imager. The accuracy and likelihood of star point detection are crucial for star sensor calculations. The main solution of this link is how star points are extracted as particle positions. The extraction of star points adopts the centroid weighting method with threshold.
The centroid algorithm with threshold has high accuracy and can effectively restore the position of star points, while using weighted synthesis to reflect the brightness level of stars. The commonly used centroid weighting algorithm can generally achieve sub pixel accuracy better than 1/10 levels.
Due to the small field of star imaging, the thresholding process of the formula is prone to interference from image isolated points such as “salt” noise. If traditional star extraction and star map recognition algorithms are used, it will result in significant star positioning errors or inability to extract star points. Therefore, in the case of using existing star point extraction, star map recognition, and attitude algorithms, a median filtering algorithm was added before the star point extraction process instead of Gaussian filtering, and research was conducted on this. The results show that this method can filter out the influence of various isolated singular points in the image on star point extraction, while enhancing the stability and correctness of star map recognition, and avoiding high computational load caused by redundant invalid particle information.
The field experiment is a direct research method for the accuracy of star sensors. Compared to the simulation star map experiment, its main purpose is to verify the two main research contents of star detection and star recognition of star sensors
The star recognition algorithm is the first step in the autonomous operation of star sensors without obtaining prior information.In the current selection process of two types of star recognition algorithms for star sensors, Pyramid algorithm based on topology traversal is adopted. After using the fourth star to lock the base triangle P0, the actual algorithm continues to select the unrecognized star qm and pair it with the stars of the combination one by one, until sufficient stars are identified before exiting the current process. This algorithm is ideal for identifying all stars in the field of view, greatly enhancing the accuracy of attitude calculation.
Attitude calculation is the final step after star recognition. In order to verify the accuracy of attitude measurement, the tracking experiment of Orion was first completed. In terms of attitude calculation, TRAID and QUEST algorithms are widely used, while star sensors use the high-precision SVD (Singular Value Decomposition) attitude solution algorithm, which can simplify a large number of matrix inversion operations and reduce redundant dimension calculations by utilizing the dimensionality reduction of SVD.
Send us a message,we will answer your email shortly!
TY-Space Technology (Beijing) Ltd. is professional focusing on advanced attitude optical sensors, especially Star Trackers for space industry.


