
Application of Image Sensors in Star Tracker:
In star sensors, image sensors are the core components of the entire system. Its task is to convert the image formed by the optical system on the focal plane into a video signal, which is processed by subsequent circuits to complete analog-to-digital conversion, obtain the corresponding digital image signal, and then send it to the subsequent electronic system for processing. Spacecraft have extremely high requirements for the reliability, weight, power consumption, and radiation resistance of star sensors.
Since the late 1970s and early 1980s, CCD has been widely used in star sensors. Currently, the technology of star sensors using CCD as a detection device has become more mature. Compared with early optoelectronic devices, it has obvious advantages and has become the preferred image sensor for star sensors. So far, this situation has not changed significantly. The reason is that due to the characteristics of the device itself and the development of manufacturing technology, the spectral response of CCD is relatively wide, The wavelength range from 0.5 to 1.0 micrometers has high quantum efficiency, and its working sensitivity is proportional to the optical integration time, which is adjustable. In addition, CCD has dominated the field of imaging technology for the past thirty years due to its small size, light weight, low operating voltage, high sensitivity, low noise, high resolution, and good spatial stability. However, some problems have gradually emerged during the application of CCD in star sensors, mainly including the following points:
(1) The ability of CCD to resist space radiation is relatively poor. Space applications have shown that under space radiation conditions, the hot spots of CCD (i.e., when there is no light signal, the pixels with signal output) increase significantly.
(2) CCD requires a variety of power sources. This makes the power supply of CCD star sensors more complex.
(3) The image charge of CCD must be output in serial order to reach the output terminal. On one hand, this increases the power consumption of CCD, and at the same time, due to the charge transfer efficiency being less than 1, the signal attenuates during transmission, affecting the quality of the signal and causing errors in subsequent processing such as star recognition.
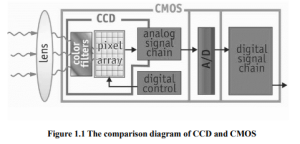
(4) The manufacturing process of CCD is complex and incompatible with the manufacturing process of general integrated circuits, making it impossible to integrate the peripheral timing, A/D conversion, signal processing, and other circuits of CCD together. Therefore, the electronic design of CCD star sensors is complex, and their volume and power consumption cannot be further reduced.
With the emergence and maturity of new sensor and microelectronics technologies, as well as new optical systems, it is inevitable to research optoelectronic devices that are more suitable for star sensor applications, which will drive the development of star sensors. The emergence of APS (Active CMOS Image Sensor) has found a more effective image sensor that can replace CCD for the development of star sensor technology. Although the use of APS devices in star sensors is still in the experimental demonstration stage, its obvious advantages make it have the potential to replace CCD and have been verified in aerospace experiments.
APS (active pixel sensor) is the abbreviation for Active CMOS (Complex Metal Oxide Semiconductor) image sensor. It is a CMOS image sensor invented and developed by JPL Laboratory in the 1990s in the United States. APS is an active pixel structure formed by adding an amplifier to the photodiode of each pixel in a CMOS image sensor, which improves its performance.
The APS device adopts the standard CMOS semiconductor production process, inheriting the advantages of CMOS technology. Due to the mainstream manufacturing process of ultra large scale integrated circuits and high integration, multiple functional circuits can be integrated onto a single chip as needed to form a single chip camera, making it small in size, low in power consumption, light in weight, and cheap in price. As a solid-state imaging device used in star sensing, APS has the following advantages compared to CCD:
Based on VLSI technology, APS can easily integrate photosensitive arrays, driver and control circuits, analog signal processors, A/D converters, all digital interfaces, and other components together to achieve a single chip digital imaging system. This simplifies the electronic design of star sensors, reduces peripheral circuits, and reduces the volume and weight of the imaging circuit system. This is very beneficial for achieving miniaturization of star sensors.
APS generates a current signal directly after photoelectric conversion, requiring only a single 5V (or 3.3V) power supply, with a power consumption of only 1/10 of CCD. At the same time, a single power supply further simplifies electronic circuits.
Due to the direct readability of pixel signals, the impact of CCD transfer efficiency is avoided, which enhances anti-interference ability. Additionally, radiation resistant APS has been developed specifically for space applications.
Due to the fact that the photoelectric detection and output amplifiers of APS are located within pixels, they can be individually selected and read out like DRAM, which is very beneficial for tracking and recognition of star sensors. They can randomly read pixels in areas of interest, increasing work flexibility and efficiency.
Since the rapid development of APS devices in the early 1990s, various star sensor production companies have been conducting research on the application of APS image sensor devices in space technology fields such as star sensors, aerospace reconnaissance cameras, and interstellar optical communication, such as IMEC Research Institute in Belgium, JPL (Jet Propulsion Laboratory) in the United States, Galileo Avionica Space Company, and Matra Makeni Space Company in France.
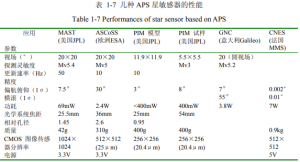
In order to develop smaller, higher precision, and lower power consumption star sensor products, major international star sensor suppliers are actively researching star sensors and related technologies based on CMOS image sensors. They have achieved a lot of research results in the manufacturing technology of CMOS image sensors, the design and interface technology of CMOS digital cameras, and the testing technology of new star sensors, and have basically entered the practical stage. Table 1-7 shows the performance comparison of APS star sensors in various countries.
With the development of small satellites and even micro/nano satellites, the accuracy requirements for their attitude control are becoming increasingly high. However, traditional star sensors are difficult to apply to micro/nano satellites due to weight and power consumption reasons. The high-performance APS chips are maturing and developing, and the new generation of APS chips have greater advantages in small size, signal-to-noise ratio, and integration, making APS star sensors particularly suitable for the requirements of attitude control of small satellites for star sensors. Replacing CCD star sensors with APS star sensors on microsatellites has become an inevitable trend in the development of new attitude sensitive devices, which can achieve high-resolution remote sensing of ground for nanosatellites and provide low power consumption, high integration, high accuracy, and simple and reliable operation to replace analog or CCD sun sensors for microsatellites.
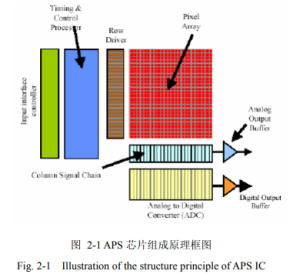
The basic structure of APS chips is shown in Figure 2-1, which is usually composed of several parts such as image sensitive unit array, row driver, column driver, timing control logic, AD converter, data bus output interface, control interface, etc. These parts are usually integrated on the same silicon chip.
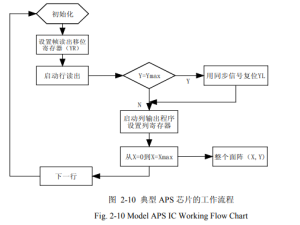
APS chips can integrate different functional unit circuits as needed, so the working process is also different. The structure of a typical APS chip is described earlier, and the process of coordinating the work of its various parts is shown in the following figure:
Although APS devices have a history of only over a decade, they have obvious advantages in many aspects, making research on their performance, improvement, and application fields extremely active. In many fields, they have replaced CCD and become the mainstream of the image sensor market.
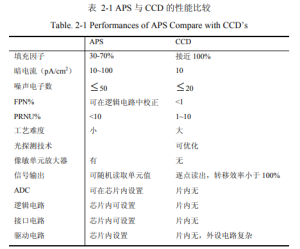
Due to the use of the same silicon material as CCD, APS has similar spectral response and quantum efficiency, as well as similar pixel size and charge storage capacity. However, due to the CMOS technology and process, as well as the structural characteristics of active pixels, APS has advantages that CCD cannot compare: high integration, which can implement a single chip camera; A single 5V (or 3.3V) power supply with a power consumption less than 1/10 of CCD; Can be used in ultra-low temperature and radiation environments, with radiation resistance; The data readout method is flexible, with a window mode that can randomly read pixels in the area of interest, as well as a large dynamic range and no blurring of the image.
The disadvantage of APS devices lies in their photoelectric characteristics and photosensitive area. Compared to the fill factor of CCD100%, the fill factor of APS is generally 30% -70%. Moreover, the standard CMOS process makes CMOS image sensors slightly inferior to CCD in terms of signal-to-noise ratio, sensitivity, image non-uniformity, dark current noise, etc. Table 2-1 lists the performance comparison between APS and CCD.
Main technical specifications for star sensor design
Different task requirements have different design requirements for star sensors, with the need for small satellites and microsatellites. Reducing the size and weight of star sensors and reducing power consumption has become a trend in the development of star sensors. This is also one of the reasons why APS image sensors have great potential in star sensors.
For the design of a star sensor system, the first consideration should be the technical indicators that the star sensor system should meet, generally including field of view, magnitude sensitivity, as well as catalog size, update rate, volume, and weight. These technical parameters are both interrelated and mutually constrained, and together they determine the performance level of the star sensor system.
(1) Field of View (FOV)
The field of view is one of the most important technical parameters of a star sensor. The diagonal direction of the field of view of a star sensor usually ranges from a few degrees to over 30 degrees. The size of the field of view determines the size of the star map collected by the star sensor, which affects its various performance.
Reducing the field of view angle of the star sensor will improve the angle measurement accuracy of a single star. But for small field of view optical systems, in order to ensure a sufficient number of stars in the field of view, the lens aperture diameter of the optical system needs to be increased, because increasing the aperture can enable the system to detect more dark stars. The large aperture leads to an increase in the volume and mass of the optical system. The small field of view, large aperture, and detection of many dark stars result in an increase in the number of stars included in the corresponding catalog, resulting in an increase in the size of the catalog. This means that star recognition algorithms become rapidly more complex and computationally expensive as the number of navigation stars in the catalog increases. Therefore, the design of star sensors should consider trade-offs in terms of field of view angle, detection chip, focal length, and angle measurement accuracy.
(2) Measurement accuracy
The measurement accuracy of a star sensor refers to the final output attitude angle measurement accuracy of the star sensor, which is the most important technical parameter and performance indicator of the star sensor.
The accuracy of single star measurement is the foundation of the overall accuracy of star sensors, which directly affects the accuracy of attitude angle measurement. The precision of centroid interpolation subdivision, also known as sub pixel resolution, is a key technology to improve measurement accuracy. In theory, if the accuracy of signal grayscale measurement is high enough, sub pixel subdivision can achieve ideal accuracy. However, in use, the fluctuation of signal values caused by noise limits the further improvement of subdivision accuracy, and the level of subdivision accuracy is closely related to the signal-to-noise ratio.
The three-axis attitude accuracy of star sensors is related to the measurement accuracy of a single star and the number of stars involved in star recognition and attitude calculation in the field of view.
For a certain centroid accuracy, increasing the field of view angle and appropriately increasing the number of available stars in the field of view can improve the roll accuracy, which is consistent with the requirements of star sensors with large field of view and high detection sensitivity.
The measurement accuracy of star sensors is related to the design indicators of the system. When the field of view angle of the system and the size of the image sensor array are fixed, the improvement in measurement accuracy can be determined by the level of centroid interpolation and subdivision accuracy.
The precision of centroid interpolation subdivision, also known as sub pixel resolution, is a key technology to improve measurement accuracy. In theory, if the accuracy of signal grayscale measurement is high enough, sub pixel subdivision can achieve ideal accuracy. However, in use, the fluctuation of signal value caused by noise limits the further improvement of subdivision accuracy, and the level of subdivision accuracy is closely related to the signal-to-noise ratio.
(3) Magnitude detection sensitivity
The sensitivity of magnitude detection indicates the ability of star sensors to detect the darkest stars in the field of view, and it is the most important indicator to characterize the detection ability of star sensors.
In order to increase the number of effective stars in a certain field of view, it is necessary to improve the magnitude sensitivity of the system. At the same time, increasing the magnitude detection sensitivity will greatly improve the accuracy of single star measurement. The magnitude sensitivity is closely related to the detector sensitivity. The sensitivity of a camera system is determined by the aperture size of the lens and the quantum efficiency of the image sensor. When the detector is fixed, the system sensitivity is determined by the lens and exposure time of the system.
In order to improve the sensitivity of magnitude, the direct method is to increase the camera aperture, but this will increase the weight of the system. Increasing exposure time is another option, however, it can lead to a decrease in system update speed and result in image dragging, reducing the accuracy of the image centroid and affecting measurement accuracy.
Increasing the field of view can effectively solve the relationship between the number of observable stars and the sensitivity of magnitude. A star sensor with a wide field of view can observe many stars in its field of view, so reducing sensitivity and lens aperture will not reduce the system’s availability of stars. Moreover, the focal length can be reduced along with the aperture, which can effectively reduce the weight of the optical system and thus reduce the system’s weight.
The number of stars in a star map is related to the sensitivity of the detection magnitude and the size of the field of view. The higher the detection sensitivity and the larger the field of view, the more stars can be detected.
(4) The availability and catalog size of stars
The availability of stars refers to how many stars within a certain field of view can appear with a high probability under certain conditions. The number of available stars in the field of view is of great significance in achieving high centroid subdivision accuracy and improving detection accuracy.
The size of the star catalog required for star sensors depends on the system’s magnitude detection sensitivity and field of view angle. If the system has high sensitivity in detecting magnitude (such as large aperture, long integration time, etc.), a large catalog is required accordingly.
The selection of a star catalog should first be based on the field of view angle and magnitude detection sensitivity of the star sensor, ensuring that sufficient stars can be detected within the field of view. On the premise of ensuring measurement accuracy, significantly expanding the field of view can create favorable conditions for reducing the detection magnitude, reducing the catalog, reducing star recognition calculation time, and quickly providing attitude measurement data.
(5) Update rate
The update rate of star sensors is determined by exposure time and image processing time.
In order to improve the signal-to-noise ratio, it is generally necessary to increase the exposure time. As the exposure time increases, the optical integration of the image sensor generates more electrons, enhances the output signal, and increases the signal-to-noise ratio. However, it also reduces the centroid accuracy due to the saturation of bright stars, making it only suitable for stars with medium brightness. In order to improve the speed, it is necessary to reduce the exposure time, which will reduce the measurement accuracy and the sensitivity of dark stars. At the same time, the high speed also brings image dragging, both of which will cause a decrease in signal-to-noise ratio. The accuracy of the entire attitude control system requires that the entire operation be completed within a specific time.
So, for a stable platform, exposure time and accuracy are mutually constrained, and their relationship needs to be comprehensively considered by the requirements of the aircraft itself.
(6) Volume and mass
With the rapid development of micro satellite applications, the requirements for the volume and quality of star sensors are becoming increasingly strict. The volume and mass of star sensors are mainly determined by two aspects: electronic systems and optical systems.
The volume and quality of electronic systems are determined by image sensors and electronic processing circuits. As APS image sensors require simple peripheral circuits, single power supply, and high integration level, they have significant advantages in reducing volume and weight.
The reduction in volume and mass of optical systems is of great significance to the system. The design of a new optical system with a large field of view has significant advantages in reducing the volume and weight of star sensors.
As the main part of star sensors, the selection of focal plane image sensors and the design of their electronic systems are the core of star sensor design. In order to achieve the design specifications of star sensors, the parameters and selection of image sensors often require repeated calculations and considerations.
Focal length, aperture, and field of view are three closely related and mutually constrained parameters that directly determine the expected performance of star sensors.
The parameters selected for the optical system of the star sensor must ensure that the star sensor has a sufficiently high capture probability for a specific number of stars, and the design difficulty should be minimized as much as possible.
The detection target of the star sensor optical system is all sky stars. We know that the spectral types of stars can be divided into seven major categories: O, B, A, F, G, K, M, and each major category can be divided into ten subcategories from 0 to 9. Therefore, there are a total of 70 spectral types of stars throughout the sky, with significant differences visible. Therefore, when designing optical systems, it is necessary to comprehensively consider the spectral distribution characteristics of stars and the spectral response characteristics of APS in order to ensure that the sensor achieves the highest possible sensitivity.
APS Starlight Signal Analysis
Star sensors take stars as the observation target, and for star sensors, stars can be seen as point light sources with certain spectral characteristics at infinity, which are imaged on the image sensor as point shaped light spots distributed in a darker background. The grayscale distribution of the light spot reflects the brightness of the star; The determination of the position of the light spot, that is, the coordinates of the star point imaged on the focal plane APS, can be used to calculate the attitude of the spacecraft.
(1) The radiation characteristics and magnitude of stars
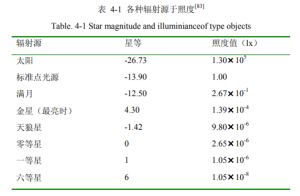
Usually, stars can be considered as blackbody radiation to discuss the signal energy of stars, and the energy radiation of stars mainly depends on the temperature of the star itself. The radiation intensity of a star itself, known as its objective brightness, depends on the temperature of the star itself.
Due to the fact that the brightness of stars we observe is the result of factors such as distance and transmittance that affect their luminous intensity, it is called subjective brightness and is the focus of discussions on star sensors. Subjective brightness is represented by magnitude, and the brighter the star, the lower its magnitude. A star with a magnitude of 0 is exactly 100 times brighter than a star with a magnitude of 5.
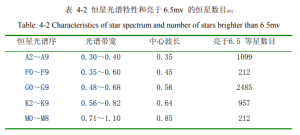
In astronomy, the spectra of stars are represented in alphabetical sequences: O, B, A, F, G, K, M, R, N, S. Each spectral type from O to M can also be divided into 10 subtypes, such as G2 for the Sun and A0 for Vega. The final R, N, and S types of the spectral order are just a branch of the spectral order, and their chemical composition is slightly different from other types of stars, with temperatures slightly cooler. The spectral response range of the CMOS APS image sensor is in the visible and near-infrared bands, corresponding to the A-M spectral type in the stellar spectral sequence. The detector can only detect stars in this wavelength range. Table 4-2 shows the spectral order of stars in the visible light range and their corresponding spectral range, as well as the number of stars brighter than 6.5mv.
(2) The Impact of APS on the Signal Energy of Stars
Most CMOS image sensors have a peak spectral response that is biased towards infrared. For stars of the same magnitude, stars with a spectral red or infrared bias are more easily detected, while stars with a spectral blue bias are more difficult to detect.
The charges generated in star sensors contain three types of signals: signal charges generated by the target light energy of stars, circuit noise generated by star sensor systems, and background charges generated by the spectral density of sky dark background radiance. These should be considered separately in the analysis.
(3) Subpixel Subdivision Localization Method for Starlight Images
The sub pixel interpolation subdivision algorithm is also known as the sub pixel localization method. In the measurement of star spot position, the use of interpolation subdivision technology can improve the positioning accuracy of the star image centroid. If the target’s image points on the array detector form a certain size of scattered spots, and the brightness inside the spot is approximately Gaussian distribution, as long as the effective area of the spot is greater than one pixel, it can be used. For measurement systems with short focal lengths and optical system designs that have reached the diffraction resolution limit, the target image point may not exceed the size of one detector photosensitive element. At this point, the image spot can be covered by multiple photosensitive elements through appropriate defocusing, usually 3 × 3 pixel sizes are optimal.
The detection ability of a star sensor refers to the ability of the star sensor to detect the weakest star.
The detection of star signals in star sensors is the process of star recognition for the captured or tracked star images. Studying the detection ability of star sensors is to detect and recognize star signals in star images under the sky background.
(1) Detection sensitivity
The energy of a signal is distributed based on the ratio of pixel area to spot area, which essentially calculates the average energy of each pixel within the spot.
(2) Noise threshold detection
The energy of the signal should be the energy of the peak pixel of the spot. According to the approximate Gaussian distribution of the spot energy, the ratio of the central pixel energy to the spot energy for a certain size of spot can be calculated, which is the energy concentration. The size of the actual imaging spot and the concentration of energy will affect the detection sensitivity. Based on this, the defocus of the optical system can be determined to meet the requirements of detection sensitivity and centroid algorithm.
(3) The light spot is imaged at different positions in the pixel, and the energy integration on the pixel is different
Based on this consideration, the difference in energy concentration on the center pixel of the light spot was analyzed when the center position of the light spot is located at different positions within the pixel. Simulation experiments show that when the center of the light spot coincides with the center of the pixel, the concentration of energy is the highest. When the center of the light spot is imaged between two pixels, the concentration of energy is the lowest. Therefore, in actual detection, the change in detection sensitivity caused by this randomness should be considered.
Methods for improving star detection capability
Through the analysis of the evaluation model for star detection capability of star sensors, it is known that the system’s star detection capability depends on the field of view and magnitude detection capability. Due to the signal-to-noise ratio being the criterion for the sensitivity of magnitude detection, measures can be taken to increase the detection energy of star target signals, reduce the impact of noise during the measurement process, and effectively improve the magnitude detection ability. The main methods to improve signal-to-noise ratio are:
(1) Extend the integration time
(2) Add multiple frames
(3) Increase the effective aperture of the optical system
(4) Expand the field of view
(5) Improving the imaging quality of optical systems
(6) Improving the imaging sensitivity of electronic systems
conclusion
With the continuous reduction of spacecraft size and the development and improvement of CMOS technology, APS image sensors have more prominent advantages in system power consumption, volume, weight, cost, functionality, radiation resistance, and reliability. If the performance of APS devices is further improved, making the detection ability and accuracy comparable to CCD, it will definitely replace CCD. This substitution will lay the technical foundation for the development of small size, light weight, low power consumption, and low cost star sensors, which are increasingly widely used in space imaging, space exploration, and other fields.
It can be foreseen that in the near future, APS will gradually replace area array CCD in numerous image sensing fields,
Becoming the main image sensor component for star sensors and other imaging systems. High performance star light/inertial integrated guidance based on APS star sensors will gradually replace traditional guidance technology and become the mainstream technology for aircraft guidance. APS star sensors will be widely used for attitude measurement and control of aircraft.
Send us a message,we will answer your email shortly!
TY-Space Technology (Beijing) Ltd. is professional focusing on advanced attitude optical sensors, especially Star Trackers for space industry.


