
Star sensor is a photoelectric conversion electronic measurement system with stars as the measurement target and light sensitive components as the core. With the development of star sensor technology and the strength of its basic functions, the application fields of star sensors are becoming increasingly widespread. The main functions of various types of star sensors are:
(1) Star map acquisition: capable of scanning the entire field of view and locating and outputting the positions of star image points within the field of view.
(2) Star tracking: locate the star image points on the detection equipment, output the coordinates of the star image points in the image plane coordinate system, and be able to repeatedly locate and output the corresponding coordinates of the updated star map for a period of time.
(3) Automatic star tracking: During a period of time, star tracking can be performed without assistance, and new stars are automatically selected and tracked when the tracked star image points leave the field of view of the sensor.
(4) Automatic attitude measurement: capable of measuring the orientation of the sensor in an inertial coordinate system without known or external attitude, angular rate, and angular acceleration.
(5) Automatic attitude tracking: During a period of time, as the sensor moves within the celestial sphere, the star image points in the field of view are automatically selected and tracked, and automatic attitude measurement is performed.
(6) Self protagonist rate measurement: Independently measuring the rotational angular rate of the sensor without relying on absolute attitude information.
(7) Image download: Captures the instantaneous signal of the entire field of view of the detection device and outputs all image information to the user.
(8) Star coordinate system navigation: Determine the position of sensors based on the external reference coordinate system defined by a certain star (such as the Earth or the Sun).
(9) Inertial coordinate system navigation: Using the inertial coordinate system as a reference, determine the position of the sensor.
According to the different functions mentioned above, star sensors are divided into five categories:
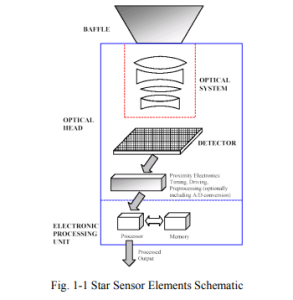
Figure 1-1 shows the structure diagram of the star sensor system, consisting of two main parts: the optical head body and the electrical signal processing unit. The main body of the optical head is usually composed of a light shield, an optical system, and a detector. The light shield mainly absorbs and eliminates stray light from the Earth, sun, and moon by blocking the leaves, and can be directly installed in front of the optical system. The optical system consists of a series of optical lenses and mechanical supports, mainly used to gather light entering the field of view. The detector is composed of image sensors (such as CCD and CMOS), working circuits (such as timing, driving, processing, etc.), and refrigeration devices, mainly used to form star maps. The electrical signal processing unit usually consists of a microprocessor, power supply, software algorithms, and a star catalog. Software algorithms mainly include star point extraction, star recognition, and attitude calculation.
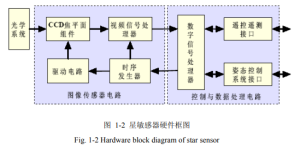
The hardware structure diagram of the star sensor is shown in Figures 1-2.
(1) Image sensor circuit
Generally, it includes CCD focal plane components, driving circuits, timing signal generators, and video signal processors;
(2) Control and data processing circuits
This includes hardware and connectivity analysis, subdivision algorithms, star recognition, attitude angle calculation, and coordinate conversion software for digital signal processors (star image memory, star image address generator, program memory, star catalog memory, CPU) and interface circuits.
(3) Optical system
Complete optical imaging of the starry sky, imaging it on an optical focal plane; The detector is placed on the optical focal plane to complete photoelectric conversion and convert the star image into video electrical signals for output;
(4) Video processor
Complete video processing, including noise reduction (correlated double sampling), bias, and gain adjustment; Finally, perform A/D conversion to output digital images; The timing signal generator and driver provide the working timing for controlling the CCD detector and video signal processor.
(5) Digital Signal Processor
The output digital image is transmitted to the digital signal processor for processing work such as star identification, single star positioning, star recognition, calculation of star sensor attitude angle, and spacecraft attitude angle. Determine the orientation of the star sensor’s optical axis relative to the inertial coordinate system, that is, give the attitude quaternion in the inertial coordinate system.
There are usually four working modes for star sensors: self check working mode, capture working mode, tracking working mode, and imaging working mode.
1) During the self check operation mode, use the light emitted by the light-emitting diode placed in front of the CCD (or CMOS) image to check the normal operation of the star sensor;
2) In capture mode, process the stars in the field of view, eliminate space debris and large targets, select the brightest 2-5 stars as navigation stars, and determine the navigation star window;
3) In tracking mode, process star data within the navigation star window, calculate the precise position of the navigation star, calculate and output the 3-axis attitude angle, and update the position of the navigation star window at the same time;
4) In imaging mode, the star sensor is used as a camera to capture and store the stars in the field of view, and can transmit the stored starry sky images to the ground when needed.
The development of star sensors has gone through three stages: early star sensors, first generation CCD star sensors, and second generation CCD star sensors:
1.Early Star Sensors
Early star sensors used image tubes as detection devices, such as small astronomical satellites (SAS-C), international ultraviolet detectors (IUE), high-energy astronomical observatories (HEAO1,2,3), MAGSAT, and other star sensors in aerospace applications.
The image dissector is a simulator device that uses focusing and offset circuits, and there are many difficulties that are difficult to overcome in practical applications. When the accuracy requirement is below 30arcsec, the image tube star sensor can still meet the accuracy requirements through strict calibration techniques. When the field of view is above 2 ° and the accuracy requirement of 1 arcsec needs to be maintained, it is necessary to maintain the simulation stability of the image analyzer below 0.04%, which is difficult to achieve for a simulator device. In addition, the size, weight, magnetic effects, and high-voltage breakdown of the image tube also limit its use and development.
In the 1970s, with the development of solid-state image sensors such as charge coupled devices (CCD) and charge injection devices (CID), people began to use solid-state image sensors as detection devices, and developed solid-state star sensors with better performance than image tubes. Due to the characteristics of the device itself and the development of manufacturing processes, CCD star sensors are gradually occupying a dominant position.
2.First generation CCD star sensor
In 1974, JPL began researching and developing CCD star sensors, mainly using technologies such as area array CCD devices and microelectronic controllers. Since the late 1970s, with the gradual maturity of CCD technology, area array CCD star sensors have gradually entered a mature technological stage. Since then, almost all star sensors have used area array CCD as image sensors.
Early CCD star sensors had a small field of view and strong ability to detect dark stars, with a CCD pixel count of typically 300 × Around 400. Due to the small field of view, the focal length of the lens can be long. When the relative aperture is fixed, the effective aperture can be large, which has great advantages in improving the ability to detect dark stars. The measurement accuracy of a single star can reach a relatively high level. However, this method has a fatal drawback that in order to calculate the attitude angle, a large catalog must be used. Star recognition and attitude calculation can be very complex, and the calculation time is long, making it difficult to provide real-time attitude angle calculation results. At the same time, in order to improve the detection ability of dark stars, the optical system has a long focal length and a larger mass and volume of star sensors. The star sensors of this period were called the first generation star sensors, which mainly determined their attitude by tracking several bright stars captured in the field of view.
3.Second generation star sensor
In the 1990s, in order to meet the increasingly strict requirements of the continuous development of aerospace technology, people began to research and develop second-generation star sensors. Compared to the first generation star sensors, the significant features of the new generation star sensors in design are large field of view, small star catalog, low detection star magnitude, direct output of attitude angle, no attitude accumulation error, fast fault recovery ability, intelligence, etc. In addition, they also have excellent characteristics such as low cost and miniaturization. Its main performance characteristic is to solve the attitude measurement problem under “lost in space”, with the function of autonomous navigation, which independently completes the initial attitude acquisition and tracking of the aircraft’s three-axis attitude without human intervention and any prior attitude information. Due to the continuous adoption of new technologies, the volume, quality, and power consumption of the second generation star sensors have been continuously reduced, and their various performance has been continuously improved. The typical data for 2001 is: a mass of 1-7 kg, a power consumption of 5-15W, an accuracy of angular second level, and an update frequency of 0.5-10Hz.
In the mid to late 1990s, the design of spacecraft gradually developed towards miniaturization, intelligence, and low cost, which correspondingly put forward higher requirements for the functionality, volume, power consumption, and other indicators of attitude measurement equipment. At present, star sensors are still in a rapid development stage, and their research directions mainly focus on the following aspects:
At present, the development focus of star sensors has gradually shifted to autonomous navigation type star sensors. The new generation star sensors have become a complete position and attitude measurement component, which can not only accurately measure star coordinates, but also complete star map recognition, star map matching, and attitude calculation, directly outputting attitude angle data. The development of autonomous navigation star sensors will have a significant impact on attitude control systems, and gyro free guidance systems will inevitably replace inertial guidance systems and satellite inertial integrated guidance systems.
In order to meet the requirements of miniaturization of aircraft and interstellar exploration, the development goal of the second generation star sensors is to obtain attitude measurement instruments with a weight of 200g~300g and a power consumption of only 400mW. To achieve this goal, it is necessary to use optoelectronic detection devices that are smaller in size, lower in power consumption, and more powerful in functionality. The APS image sensor that this article aims to study has become one of the key research topics in star sensors.
At present, the existing information processing systems in star sensors have inherent drawbacks such as long star map capture time and large internal star catalog storage capacity, which cannot achieve higher intelligence. Therefore, the rapid capture of star maps and the compression of internal star catalogs have become the main research topics in star sensor information processing systems.
Developing an INS/CNS/GPS integrated navigation system. This system is mainly used for precision guidance of mobile launched long-range ballistic missiles and other fields. Due to the much harsher working environment of missiles compared to space vehicles, developing a star sensor and its information processing system that can operate normally over a large dynamic range has become one of the research focuses of this integrated navigation system.
Due to the stability of UV band images and the weight characteristics of star sensors and visible light sensors, the development of UV band star sensors is also one of the research focuses of the second generation star sensors. This sensor combines a star sensor with a sun sensor and a horizon sensor. With only one sensor component, it can sense the radiation of stars, the sun, and the Earth, achieving the goal of one machine for multiple purposes. It is very suitable for medium precision attitude determination/navigation systems of small satellite platforms for Earth observation.
Since the 1990s, with the emergence and maturity of new sensor and microelectronic technologies, as well as new optical systems, the design and application of new optical systems and the development and application of active pixel image sensor APS have been the two most active hotspots in star sensor technology.
Send us a message,we will answer your email shortly!
TY-Space Technology (Beijing) Ltd. is professional focusing on advanced attitude optical sensors, especially Star Trackers for space industry.


