
The development and application of star sensors have been going through more than half a century, but with the continuous development of related detector devices and microelectronics technology, star sensors have also been constantly updated, moving towards smaller size, power consumption, and mass, higher accuracy and update rate.
The opening angle of stars in space is generally in the milliarc-second level, and the maximum opening angle is only 0.05 ”. Star sensors that use stars as reference targets for spacecraft attitude measurement are currently known to have the smallest drift and the highest absolute attitude measurement accuracy. Moreover, star sensors have obvious advantages in reliability, volume, and weight, and are widely used in today’s aerospace systems. At present, the research on microsatellites has become a hot topic in the aerospace industry of various countries. The integration of various payload components on satellites is becoming increasingly high, and the functions are becoming more complex. The requirements for satellite attitude accuracy are also increasing. However, traditional attitude determination components such as gyroscopes, solar sensors, magnetometers, horizon sensors, etc. cannot meet the current application requirements in terms of measurement accuracy, power consumption, quality, and other aspects.
With the rapid development of microsatellite technology and scientific technology, the design cycle of microsatellites is constantly being broken through, and the development of various miniaturized components is also becoming more and more rapid. For example, the first independently developed single board nanosatellite “Tiantuo-1” launched by the National University of Defense Science and Technology in May 2012, the Tiantuo-2 nanosatellite launched in September 2014, and the Tiantuo-3 nanosatellite launched in September this year, The continuous breakthroughs in the satellite design cycle, as well as the continuous updates and upgrades in the research and development of miniaturized components, all indicate that there has been a revolutionary leap in the design and research and development technology of satellites and their components. Micro and nano satellites are developing towards more miniaturization, intelligence, and autonomy. Moreover, as the technology of micro and nano satellites becomes increasingly mature, the requirements for space tasks become higher and more complex. These all require micro and nano satellites to have more precise attitude control capabilities in space. For example, high-resolution ground imaging satellites with an orbital height of 1000km may have deviation in attitude control accuracy when observing targets in a specific area
0.1 °, then the Earth observation will deviate by nearly 2km, and the attitude control accuracy largely depends on the determination accuracy. High precision star sensors can effectively avoid this problem, so star sensors play a crucial role in determining the high-precision attitude control of satellites.
The development of star sensors is always accompanied by the development of scientific technology and production processes, as well as the improvement of application requirements. Therefore, the development of star sensors can be roughly divided into the following three stages:
(1) The first stage, which is the early star sensor. Since the 1940s, it was mainly due to the demand for higher navigation accuracy for strategic bombers, reconnaissance planes, and missiles and other war weapons, which led to the emergence of star sensors using photoelectric enhancers, slit modulators, and other image detectors. Due to the limitations of scientific technology and manufacturing processes at that time, star sensors during this period could not be directly applied to space environments until the 1960s, The former Soviet Union only designed star sensors that could be directly applied to space spacecraft for the first time. However, during this period, star sensors had significant deficiencies in accuracy, power consumption, working time, and were no longer suitable for modern spacecraft applications.
(2) The second stage is the non autonomous CCD star sensor. Mainly with the emergence of a new type of CCD (Charge Couple Device) image sensor in the 1970s, and in 1975, Goss from JPL Laboratory in the United States conducted experiments on the application of CCD in star sensors in terms of resolution, measurement accuracy, radiation resistance, etc., and found that it has significant advantages, leading to the rapid development of CCD star sensors. During this period, the single star measurement accuracy of star sensors could reach 10 ”, and the multi star measurement accuracy could even reach 2 ”~3 ”. However, they basically did not have the ability to recognize autonomous star maps and could only output the angular distance of the captured star points.
(3) The third stage is a fully autonomous star sensor. In the 1990s, with continuous leaps and bounds in microprocessing technology, hardware memory technology, and other aspects, star sensors could directly integrate various processing and storage modules internally, allowing them to directly store navigation star libraries for star map recognition, achieving full sky coverage of navigation stars, and thus achieving autonomous star map recognition and real-time attitude angle output in all sky areas. During this period, star sensor technology has become very mature, especially the application and development of CMOS image sensors in star sensors, which has led to rapid development in miniaturization of star sensors. CMOS star sensor products have significant advantages in performance, power consumption, volume, and other aspects, especially with the further development of new optical systems, sensor technology, and large-scale integrated circuits. Many foreign research institutions have achieved significant results in the research of micro star sensors, such as Ball Company in the United States, Lockheed Martin Company, Sodern Company in France, Jena Optronik GmbH Company in Germany Italy’s Galileo company, as well as numerous institutions such as the Danish University of Science and Technology and the JPL Laboratory in the United States, have achieved rich results in star sensors.
(1) Indicator requirements
Before designing a micro CMOS star sensor, it is necessary to set a preset indicator for the system to guide the actual system design,
(2) Field of view and focal length
The field of view of a miniature star sensor usually ranges from a few degrees to over twenty degrees. As one of the key technical indicators of a miniature star sensor, the size of the field of view directly affects the size of the star map taken by the miniature star sensor, and also affects other performance indicators of the miniature star sensor. Usually, in order to improve the single star measurement accuracy of the star sensor, the field of view angle of the star sensor is reduced. However, small field of view optical systems can only ensure sufficient stellar targets in the field of view for successful recognition and matching by increasing the aperture size of the optical lens, as large aperture optical systems can detect more dark stars. However, detecting more dark stars means that the number of navigation stars in the navigation star library will rapidly increase, which will lead to a sharp increase in the time for star map processing and recognition, as well as more redundant matching, resulting in complex and inefficient star map recognition algorithms. At the same time, a large aperture lens will also increase the weight and volume of the entire system.
(3) Navigation stars, etc
When using a miniature star sensor to obtain images, there is a close relationship between magnitude, field of view angle, and the number of visible stars in the field of view.
(4) Measurement accuracy
The measurement accuracy of star sensors refers to the accuracy of the final attitude angle output. The measurement accuracy of a single star directly affects the overall measurement accuracy of the star sensor, and also affects the final attitude angle accuracy. After the field of view angle of the star sensor and the image sensor are determined, the single star measurement accuracy of the star sensor is basically determined, which depends on the angular resolution of a single pixel of the image sensor.
(1) Optical part design
Light shield: Star sensors are imaging systems that detect dark targets and are very sensitive to interference from stray light. Therefore, each star sensor lens is equipped with a light shield. Stray light can be divided into two types: external stray light and internal stray light. External stray light mainly includes sunlight, terrestrial light, etc., while internal stray light is mainly generated by the optical system itself due to changes in temperature and other factors. For star sensors, external stray light accounts for the main part, which seriously reduces the contrast of star sensor imaging and needs to be eliminated. The sunshade of the star sensor should be specially designed based on the satellite orbit and the installation position of the star sensor on the satellite body.
Optical lens: Star sensor imaging systems are different from ordinary imaging systems in that they focus on the accuracy of the centroid position of star points through subpixel methods, which is different from traditional high-definition imaging of single points. Therefore, in the design of optical systems, point spread functions are used instead of traditional modulation transfer function methods as evaluation criteria to achieve the advantages of large field of view, large relative aperture, small volume, and light weight of optical systems. Considering the installation location, weight and volume limitations of the star sensor.
(2) System Design
Structural analysis and device selection: The circuit mainly includes CMOS image sensors, control and star image acquisition and processing modules, and attitude calculation.
Figure 5.3 Schematic diagram of circuit structure design
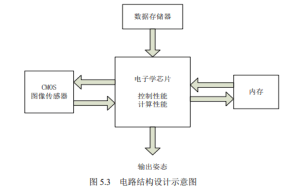
CMOS image sensors are highly integrated, with simple peripheral circuit systems, reducing the design size of PCBs and other auxiliary components; Simultaneously integrating AD conversion, sampling, and readout circuits within the chip reduces system power consumption while improving reliability. However, the filling rate and quantum efficiency of CMOS are low, and the noise is high. Therefore, in the selection of CMOS chips, it is necessary to choose high-performance chips as much as possible, and filter and remove noise in circuit design. In terms of processing circuits, due to limitations such as volume, quality, and power consumption, micro star sensors cannot be processed using traditional DSP+FPGA methods. The circuit part of the micro star sensor minimizes the complexity of the circuit while ensuring performance. This article uses a highly integrated ARM processor to complete CMOS control, star map processing, and attitude calculation.
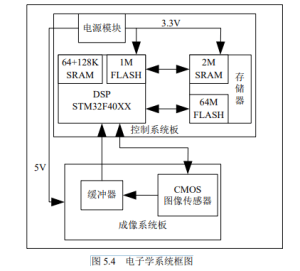
Hardware circuit design: The micro star sensor system of this system adopts a double-layer circuit board system structure, consisting of two PCB circuit boards: the imaging system board and the control system board. They are connected to each other through connectors, which can effectively reduce the size and weight of the system. The imaging system board mainly consists of a CMOS image sensor based on E2V company and a buffer for buffering signals; The control system board mainly consists of a DSP processor based on STM32F407XX, FLASH memory, SRAM memory, and power module. Adopting this system architecture design approach can effectively reduce the impact of operating temperatures such as ARM processors and power modules on CMOS image sensors. The system structure diagram is shown in Figure 5.4
Figure 5.4 Electronic System Block Diagram
Interface circuit design: After determining the system scheme and structure of the micro star sensor, the next main introduction is the interface circuit design between the system microprocessor module and the CMOS image sensor.
Figure 5.5 Interface Circuit Design
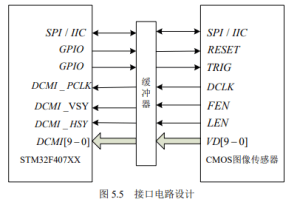
The microprocessor module STM32F407XX of the system configures the clock, shutter, output polarity, and other registers of the CMOS image sensor through SPI/IIC; Control the hardware reset pin RESET of the image sensor through the two GPIO pins of STM32F407XX to achieve hardware reset and hardware pin TRIG to control its status; Both data and clock are communicated through DCMI (Digital Camera Interface). Firstly, initialize the DCMI and DMA clock sources, then configure the DCMI control register, configure the synchronization signal polarity during DCMI communication, then configure the data bits and pixel clock polarity to enable DMA transmission, enable FIFO, and finally configure the DMA transmission module, configure the source address and destination address, enable FIFO, configure DMA transmission data bits, and enable DCMI and DMA when needed. Start collecting data after a vertical synchronization signal. Whenever DCMI and DMA are turned on, they wait for a vertical synchronization signal and then configure a register of the camera to start converting the signal and outputting image data.
Software algorithm design: The system is in star sensor mode, and the software design flowchart is shown in Figure 5.6 below.
Figure 5.6 Flow Chart of Star Sensor Mode Design
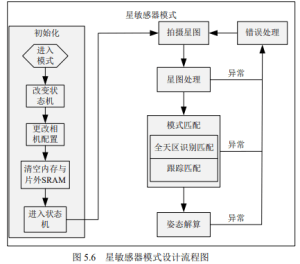
From the above figure, it can be seen that the system is in star sensor mode and has five states: 1) initialization: initialization is used to initialize the star sensor mode, configure the camera, and obtain access to memory pools and off chip SRAM and FLASH; 2) Shooting star maps: An imager captures star maps and receives data and key parameters; 3) Star map processing: Process the captured star map to extract the centroid coordinates and grayscale values of the star points in the image for subsequent recognition and processing. 4) Pattern matching: Pattern matching includes all sky area recognition matching and tracking matching, both of which are based on the star map information output from the previous state and matching star groups in the navigation star database for recognition matching. Tracking matching is much faster than all sky area matching, but requires data from the previous frame as a reference. 5) Attitude calculation: Calculate the satellite’s attitude based on the coordinate information of the matched star points, and output the Euler angle.
Send us a message,we will answer your email shortly!
TY-Space Technology (Beijing) Ltd. is professional focusing on advanced attitude optical sensors, especially Star Trackers for space industry.


