 of Star Trackers")
Schematic diagram of the working principle of the star trackers,
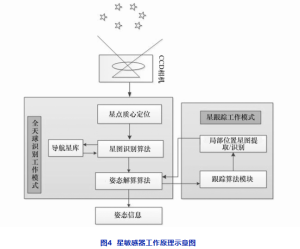
Star sensors typically include all sky sphere recognition working mode and star tracking working mode. In the all-sky working mode, the star sensor captures the star map within the field of view through an optical lens. After undergoing steps such as star centroid positioning, star map recognition, and attitude calculation, the attitude information is directly output. In star tracking mode, the star sensor utilizes prior attitude information to enter the star tracking algorithm module, and finally calculates the current attitude information through local star point centroid positioning and recognition.
From the figure, it can be seen that the key technologies of star sensors mainly include star point centroid positioning, star map recognition, and attitude calculation.
Star point centroid positioning algorithm
Star centroid positioning refers to the process of calculating the accurate position of a star in a star map. The accuracy of centroid positioning not only directly affects the attitude measurement accuracy of star sensors, but also indirectly affects the success rate of star map recognition. Angular resolution of a single pixel in an image sensor δ It can be expressed as The following formula: (In the equation, θ Is the size of the field of view angle, NCCD is the number of pixels in the image sensor array).
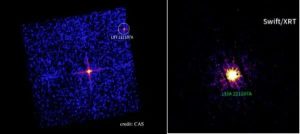
In order to improve the attitude measurement accuracy of a single star point, the optical lens of the star sensor adopts defocusing technology, so that the received star point energy can be dispersed onto multiple pixels of the image sensor, as shown in the figure:
In the process of star map imaging, many noise factors can affect the accuracy of centroid positioning. The factors that affect the accuracy of star point centroids can be divided into two types: systematic error and random error. The system error includes sub pixel subdivision positioning algorithm error and optical system error. The sub pixel subdivision positioning algorithm error refers to the systematic error generated when calculating star point extraction using the sub pixel subdivision positioning algorithm.
The accuracy of star point centroid extraction is the foundation of the entire star map processing section, which determines the measurement accuracy of star sensors. Obtaining accurate star positioning in complex environments is also an urgent issue that needs to be addressed.
Star map recognition algorithms can be divided into three categories: (1) Star map recognition algorithms based on constellation features; (2) Star map recognition algorithm based on character patterns; (3) Star map recognition algorithm based on intelligent behavior. The star map recognition algorithm based on constellation features is an algorithm that utilizes the mutual position relationships between stars to form features for recognition.
Comparison and analysis of three types of star map recognition algorithms, their advantages and disadvantages are summarized in Table 4. Type 1 refers to star map recognition algorithms based on constellation features, Type 2 refers to star map recognition algorithms based on character patterns, and Type 3 refers to intelligent behavior based recognition algorithms. Currently, in practical engineering, Type 1 is the most widely used algorithm, while Type 2 and Type 3 algorithms have not yet been widely applied.
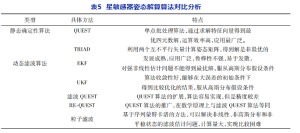
According to different specific calculation methods, commonly used attitude settlement algorithms in star sensors can be divided into static deterministic attitude calculation algorithms and dynamic filtering estimation algorithms.
(1) Static solution algorithm
The deterministic attitude solving algorithm refers to obtaining the directional cosine matrix of the satellite body coordinate system relative to the inertial coordinate system based on a set of vector observations. The results obtained by deterministic algorithms have clear geometric and physical meanings, and the instantaneous attitude of the satellite can be obtained with only one measurement. So static deterministic algorithms have the advantages of high stability, fast computation speed, and less memory consumption, and are also the main attitude determination algorithms used in star sensors at present.
(2) Dynamic filtering estimation algorithm
In practical applications, the measurement errors of satellite orbit parameters and the installation errors of star sensors can bring uncertainty errors to the measurement of observation vectors, and these errors are difficult to overcome. In order to meet the needs of high-precision attitude control, dynamic filtering estimation methods can be used to settle the attitude information of spacecraft. The dynamic filtering estimation method utilizes spacecraft to establish state equations and observation equations based on attitude dynamics equations, and obtains the optimal estimation method under certain criteria based on observation information to obtain the true attitude of the spacecraft. Compared to static deterministic algorithms, dynamic filtering estimation algorithms utilize more observation information and can provide the optimal solution in a statistical sense, avoiding the influence of uncertain factors on spacecraft attitude and improving the accuracy of attitude determination.
Both static deterministic attitude calculation methods and dynamic filtering algorithms have been practiced and applied in star sensor products.
Before the use of star sensors in orbit, it is necessary to strictly calibrate and compensate for their errors on the ground using calibration experimental equipment. However, after entering the in orbit state, the star sensor will be affected by temperature, vibration, and radiation, which may cause changes in various parameters of the star sensor. Therefore, it is necessary to calibrate the star sensor in orbit to ensure that it can maintain high-precision attitude measurement accuracy during its in orbit operation.
Send us a message,we will answer your email shortly!
TY-Space Technology (Beijing) Ltd. is professional focusing on advanced attitude optical sensors, especially Star Trackers for space industry.


