
Star tracker are the eyes of spacecraft, which can not only observe stars, but also see other things.With the continuous improvement of space launch capabilities in various countries around the world, there are more and more types of space activities, generating billions of space debris and posing a serious threat to spacecraft.
Space debris is far from the ground and has characteristics such as small size and low brightness, making it a weak target in space. There are several difficulties in achieving the detection and positioning of space debris: (1) The energy of space debris is weak, and compared to other large targets, the imaging of space debris is similar to that of background stars, occupying a small number of pixels, making recognition and positioning difficult. (2) Accurate positioning of space debris involves determining the declination and declination data of moving targets. However, the limited positioning accuracy of existing space-based monitoring platforms affects the high-precision positioning ability of space debris. Star sensor is a high-precision spatial attitude measurement device that uses stars as a reference. With the gradual maturity of star sensor technology, the current ultra-high precision star sensors in China can not only detect stars with an ultimate magnitude of+12Mv, but also capture weak and small targets in space within the field of view. By applying the performance advantages of star sensors to space debris monitoring and utilizing the star map recognition principle of star sensors, space debris is distinguished from stars, achieving fast and effective recognition of space debris and high-precision positioning, providing ideas for the expansion and application of star sensors.
The star maps captured by star sensors include stars, space debris, background noise, space radiation noise, and dark current noise. Analyzing the imaging characteristics and background statistical characteristics of stars and space debris is crucial for detecting and recognizing small and weak targets.
The basic idea of space debris detection and positioning based on star sensors is as follows: using star sensors to capture images, first perform star map preprocessing, complete filtering and segmentation operations, and complete target extraction in this way to obtain relevant information of background stars, including their position and brightness. Then, identify the stars within them, and complete the first recognition of star target. After the recognition of the entire sky area star map, Determine the three-axis attitude of the star sensor based on the attitude calculation algorithm. After the attitude calculation is completed, there is still a portion of the observed stars in the field of view that cannot be effectively matched using the all-sky star map recognition algorithm. At this time, further identification and differentiation of unmatched star points and targets are needed. By using local sky map recognition technology to distinguish space debris and star targets, space debris can be more accurately identified and their corresponding positions can be output to the outside world; Finally, the improved Kalman filtering method is used to predict and locate debris targets. The entire information processing process is shown in the following figure:
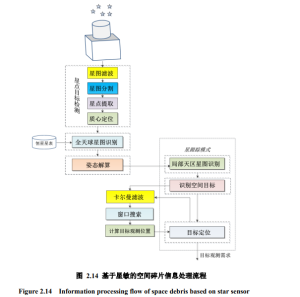
In the entire information processing process, the main problems that the star sensor is working to solve include three, namely, global star map recognition, pose calculation, local sky region star map recognition, and target prediction and positioning.
Full sky star map recognition is mainly aimed at the problem of space loss, which can achieve complete autonomous determination of the three-axis attitude of space vehicles, without the need for ground measurement and control systems to determine. Essentially, matching the observed star in the celestial coordinate system with the corresponding navigation star in the star map captured by the star sensor is star map recognition.
After identifying the entire sky area star map through a star sensor, the three-axis attitude is obtained using an attitude solving algorithm, and the attitude information is transmitted to the spacecraft attitude measurement and control system using attitude quaternions.
After the pose calculation is completed, there is still a portion of the observed stars in the field of view that cannot be effectively matched using the all-sky star map recognition algorithm. In this case, further identification and differentiation of unmatched star points and targets are needed. There are three general methods for target recognition: continuous frame image method, mask method, and morphology recognition method. Among them, the mask method reads the star catalog based on the direction obtained at the observation time, calculates the position of stars in the observation field, simulates the background star map, and subtracts the simulated star map from the observation image to identify the target.
Input the position coordinate information of the CCD plane where the target is located under the current frame conditions, use Kalman filtering to process continuous frame images (mainly correcting position coordinates and velocity information), output the position coordinates of the target in the next frame, and then achieve the positioning of the observed target. Select a target localization algorithm based on Kalman filtering, first estimate the target state, and then use window scanning method for rapid recognition and localization.
Send us a message,we will answer your email shortly!
TY-Space Technology (Beijing) Ltd. is professional focusing on advanced attitude optical sensors, especially Star Trackers for space industry.


