Star Tracker, also known as star tracker, is an attitude measurement device that uses stars as reference sources. Because stars appear extremely small, usually in milliseconds or arc seconds, and the maximum value is only 0.05 arc seconds, the attitude data information provided by the star sensor is generally in the order of arc seconds. It is currently the most precise spacecraft attitude determination tool with the smallest error over time. Because of its advantages such as good autonomy, good passive measurement concealment, strong anti-electromagnetic interference ability, high attitude and orientation accuracy, and no error accumulation over time, it has become one of the indispensable attitude measurement devices for attitude and orbit control systems of platforms such as satellites, missiles, ships and aircraft.
Star sensor is an attitude measurement instrument that integrates optical, mechanical, electronic and other technologies. It is itself a very complex system engineering. As shown in the figure below, the star sensor is mainly composed of a sunshade, an optical lens, an image sensor, an imaging circuit, an image processing circuit, a power supply and data interface, and a housing. The functions of each component are briefly introduced below:
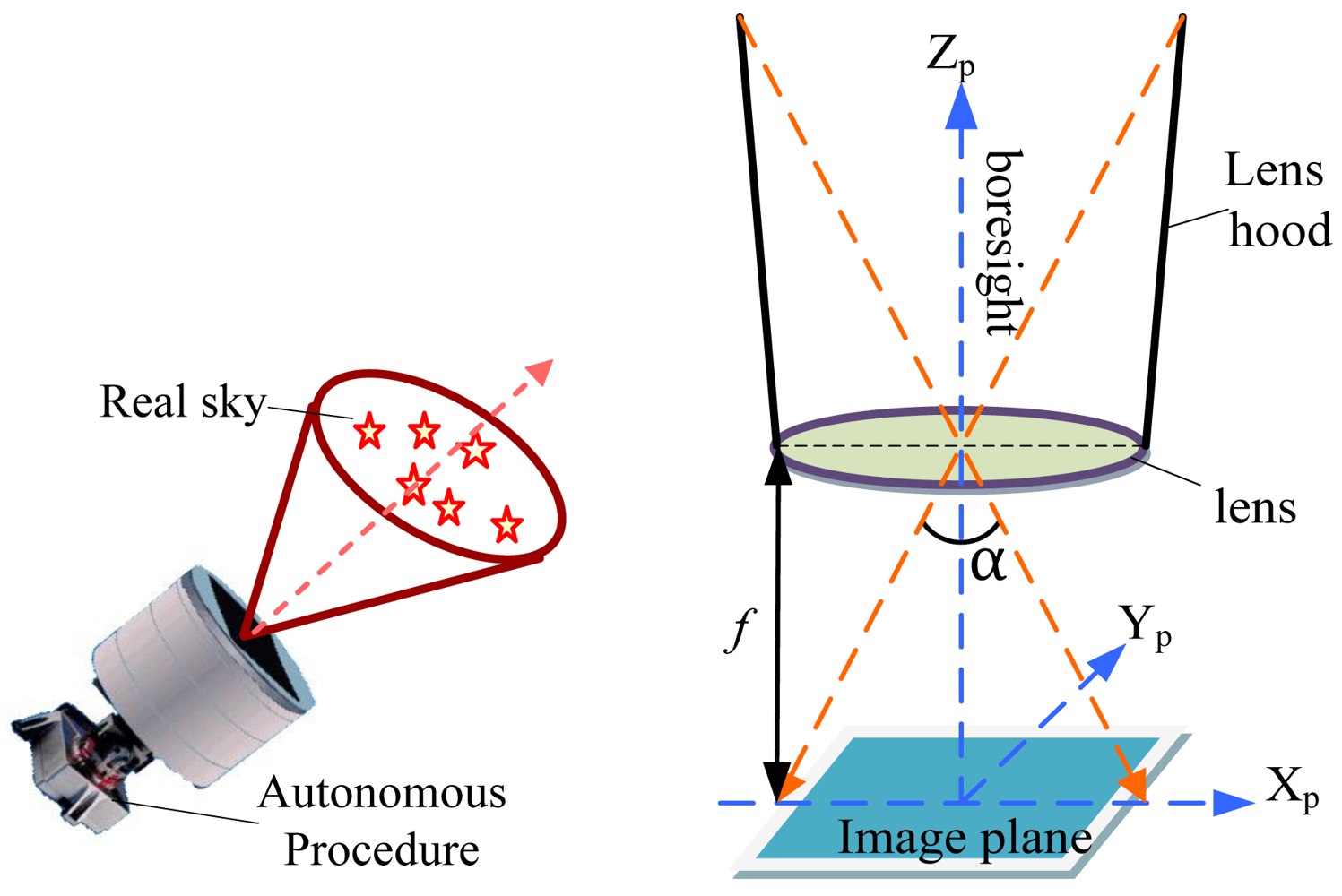
(1) Sunshade: eliminates stray light to prevent it from affecting the imaging quality of the star sensor;
(2) Optical lens: maps starlight onto the target surface of the image sensor;
(3) Image sensor: realizes the conversion of optical signals to electrical signals;
(4) Imaging circuit: realizes the imaging drive and timing control of the image sensor;
(5) Image processing circuit: realizes the processing of star sensor images and data;
(6) Power supply and data interface: realizes the stable power supply and data communication of the star sensor.
Based on the working principle, the star sensor is mainly divided into two parts: the imaging system and the image processing system. The star sensor first uses an optical lens and an image sensor to image the stars. After star point extraction and centroid positioning, the position and brightness information of the star point on the target surface of the image sensor are obtained. Then, the corresponding star in the star catalog is obtained through star map recognition. Finally, the three-axis attitude of the star sensor is obtained through attitude solution based on the recognition result, and the attitude data is provided to the carrier control system to realize the navigation of the carrier. The principle block diagram is shown in the figure below.
Beijing Tianyin Interstellar Technology Co., Ltd. is a company dedicated to the research and development of star sensors, which is jointly owned by Tianyin Electromechanical and Tsinghua University teams. Its core technology comes from Tsinghua University’s 20 years of space technology accumulation. The company independently developed and produced two series of star sensors, pico and nano. 133 products have been in orbit without fault, and have played an important role in the practice of major national space missions such as my country’s lunar exploration project and high-resolution special projects. The company’s production capacity reaches 500 sets per year, which can meet the application requirements of various spacecraft and provide professional, advanced and economical products for customers in different fields. (Non-military use)
Send us a message,we will answer your email shortly!
TY-Space Technology (Beijing) Ltd. is professional focusing on advanced attitude optical sensors, especially Star Trackers for space industry.