")
In the working process of star sensor, the performance of photodetectors, as an important component, is a key factor affecting the accuracy of star sensors. Photodetectors typically require high detection sensitivity and low noise to detect dim stellar targets, thereby achieving effective capture of star targets.
The early application of APS detectors was limited due to their high readout noise, low fill factor, and low quantum efficiency. However, with the development of third-generation semiconductor active pixel technology and the TFC (Thin Film Chip) technology of CMOS detectors, the performance of traditional APS detectors in terms of sensitivity and noise has been significantly improved. At the same time, considering the advantages of small size, low cost, low power consumption, strong radiation resistance, and flexible use of APS detectors, they are gradually being widely used in various orbital height star sensor models.
During the application process of APS detectors, due to the detector itself and external environmental factors, various spatial or temporal related noises are easily generated on the detector target surface
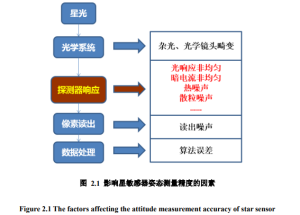
The factors that affect the accuracy of star sensor attitude measurement include lens distortion in the optical system, noise generated during detector response, pixel readout noise, and errors generated by algorithms in data processing. These factors collectively lead to a decrease in the accuracy of star sensors.
Noise generated during the detector response process – single pixel noise characterized by various reasons
The common types of noise in APS detectors include time related noise and space related noise.
(1) Time dependent noise
Granular noise, thermal noise, low-frequency noise (1/f), generative composite noise, reset noise (KTC).
(2) For spatially correlated noise
Fixed Pattern Noise (FPN), Photo Response Non Uniformity (PRNU).
Single pixel noise cannot be classified separately into any type of noise, it may be defective pixels caused by insufficient manufacturing processes or materials; It is also possible that the non-uniformity of dark current causes fixed mode noise FPN; It is also possible that it is caused by non-uniform light response PRNU or thermal noise or shot noise, which is collectively referred to as single pixel noise here. As shown in Figure 2.2, the single pixel noise in the star map appears as an independent single bright pixel.
The manifestation of single pixel noise on the detector target is a single pixel sized bright pixel, which may be caused by fixed mode noise or random noise such as thermal noise. Its main impact on the performance of star sensors is that when these single pixel noises are superimposed on the star region, they will cause the centroid position of the star to shift, reduce the accuracy of star centroid positioning, and subsequently cause deviations in subsequent angular distance calculations and a decrease in the success rate of star image recognition. Therefore, we need to carry out corresponding star image denoising work.
Traditional star image denoising methods include median filtering, mean filtering, Gaussian filtering, and other means.
In order to ensure the working performance of star sensors, the centroid positioning accuracy of star points needs to reach sub pixel or even higher, and the centroid positioning algorithm determines the positioning accuracy of the centroid.
Common star point centroid positioning methods for star sensors include:
(1) Centroid method
(2) Centroid method with threshold
(3) Square weighted centroid method
(4) Surface fitting method.
The centroid method with threshold is the most accurate centroid positioning method!
A more robust star sensor star map denoising algorithm based on edge protection (IGSWF).
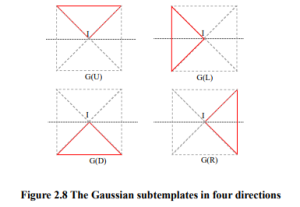
Dr. Lu Kaili’s IGSWF algorithm is proposed based on Hui Yin’s Side Window Filtering (SWF) algorithm. Although the SWF algorithm has the ability to protect edges, its ability to protect the energy inside star points is average and cannot effectively improve the accuracy of centroid positioning. Therefore, the IGSWF algorithm has made two improvements on the basis of the SWF algorithm: firstly, the improvement of the filtering window. The IGSWF algorithm cuts the Gaussian filtering window into four triangular Gaussian sub templates to achieve convolution operations with the image separately. The use of Gaussian filtering windows can smooth the background; The design of Gaussian sub templates in four directions takes into account the fact that the boundaries of the filtering process cannot be crossed. Edge protection can be achieved through sub templates, while the four directions are designed to adapt to the possibilities of various directions of the boundary Secondly, a relative minimum function 𝑓𝑚𝑛𝑛𝑛𝑛𝑚𝑛𝑛𝑓𝑚𝑛 is proposed for the shape and energy characteristics of star points, background, and single pixel noise. Ultimately, the results of the relative minimum function can be output as the denoised star map. The relative minimum function utilizes pixel classification for differentiation processing, which can make the energy distribution of the denoised star points closer to the original star points, helping to improve the centroid positioning accuracy of the star points.
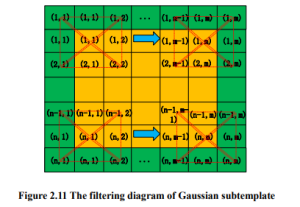
(1) Establishment of filtering templates
Considering that the star points on the detector exhibit a distribution similar to a fully Gaussian or locally Gaussian distribution, the Gaussian filter template can be cut into multiple filter sub templates and utilized. Based on the idea of edge protection and combined with the Gaussian characteristics of star points, four triangular Gaussian filter sub templates suitable for star image denoising are proposed;
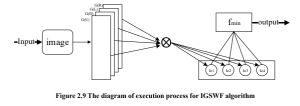
(2) Execution steps of IGSWF algorithm
① Gaussian sub template convolution; ② Find the relative minimum function 𝑓𝑚𝑚 n for convolution operations in four directions 𝐼𝑐, 𝐼𝑜 1, 𝐼𝑜 2, 𝐼𝑜 3, 𝐼𝑜 4; ③ Output of denoised images.
(3) Determining the Window Size of Gaussian Subtemplate
A relative minimum function model was established based on the differences in star points, noise, and background. The ultimate goal is to suppress single pixel noise in the star map and improve the accuracy of star centroid subdivision positioning.
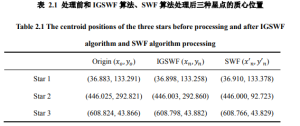
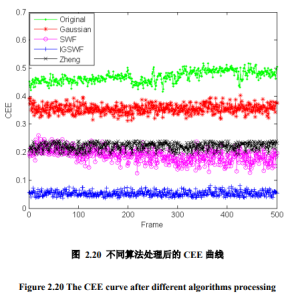
The IGSWF algorithm has the best denoising effect, followed by the SWF algorithm and Zheng algorithm, and the worst is the traditional Gaussian filtering algorithm. Compared to before denoising, the IGSWF algorithm can improve the accuracy of centroid positioning by several times, which also contributes to the successful identification of star points in the later stage.
Send us a message,we will answer your email shortly!
TY-Space Technology (Beijing) Ltd. is professional focusing on advanced attitude optical sensors, especially Star Trackers for space industry.


